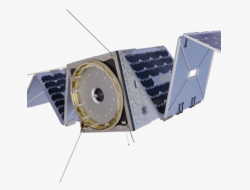
【小型衛星バス紹介】NanoAvionics - MP42

こちらの記事では、NanoAvionics社、小型衛星バス MP42 概要・詳細仕様についてご紹介致します。
目次
・小型衛星バス MP42 簡単紹介・小型衛星バス MP42 の高い多様性
・MP42 バスの特徴
・フライトコンピューター(ADCS機能含む)
・ペイロードコントローラー
・パワーシステム
・関連メディア
・お問い合わせ
小型衛星バス MP42 簡単紹介
NanoAvionics社の小型衛星バス、MP42のハード・ソフトウェア、及びミッションオペレーションインフラストラクチャーは、ベースライン設計・ミッション仕様の「ビルディングブロック」に基づいて作られております。故に、柔軟性、時間/コスト効率の高さ、幅広い汎用性、高信頼性、再現性、製造性を兼ね備えた小型衛星バスとなっています。
●NanoAvionics社、小型衛星バス MP42 に関する他の記事はこちらをご参照下さい。
【小型衛星市場への挑戦】 NanoAvionics - MP42
小型衛星バス MP42 の高い多様性
▼MP42:| ペイロードデータのダウンリンク速度を高速化 (Xバンドで最大1Gbpsダウンリンク) |
:衛星間リンクにて干渉のない リアルタイム通信が可能に。 |
| 軌道周回、軌道維持、正確な隊形飛行、 軌道同期、大気抵抗補正などの高性能 インパルス操縦を可能にする 推進システム搭載可能。 |
:軌道上での衛星の寿命長期化、 ユーザー独自のミッションに対し 対応力向上、コンステレーション維持コスト の大幅な削減 |
| MP42サブシステム | :タイプの異なるミッションを経験、 飛行実績有。 |
| LEO-LEO, LEO-GEOのオプションが利用可能 |
▼特に重要なシステム(下記記載)の放射線耐性・寿命:
・フライトコンピューター、ペイロードコンピューター、電力システム
| 放射線耐性: | 最大20Krad |
| 寿命: | LEO下にて約5年 |
MP42 バスの特徴
| バスの総質量: | 30kgから |
| ペイロードボリューム: | 48×48×32cm (ペイロードの高さはお客様の要望に 合わせて柔軟に調節可能となっています。) |
- 事前に統合・認証済み(ペイロードをすぐに搭載できる)
- 最終フライト承認、フライト準備の工程を最小限に抑えることが可能。
- コマンドレベルで実装できるデフォルトオペレーション
- 洗練されたミッションコード
フライトコンピューター(ADCS機能含む)
MP42, フライトコンピューターは以下の仕様になっております。
| ▼FPGA/CPU | ARM 32ビットCortex™ M7 CP クロックスピード:最大400MHz (設定可能) |
| 倍精度FPU |
| ▼ストレージ関連 | 1MB内蔵RAM |
| MB内蔵フラッシュメモリ | |
| 2×512KB, FMC接続型FRAM | |
| 頻繁に変更されるデータ保存用, 2×512KBのFRAM(SPI) |
|
| 最大32GB, マイクロSD NANDメモリ |
| ▼ソフトウェア関連 | フリーRTOS |
| 軌道上ファームウェアアップデート | |
| ファームウェアのパワーオンチェック& リストア |
| ▼その他 | 内蔵RTC |
| オンボード 磁気トルカドライバー |
|
| CSPサポート | |
| テレメトリログ | |
| CPU動作周波数制御 | |
| PWM出力 | |
| RFS - レコードベースの冗長ファイルシステム | |
| スクリプト・タスクを時間指定で実行可能な ミッションプランナー |
|
| 自己診断機能 | |
| ユーザーフレンドリーなコンソール |
【ADCSセンサー】:
- 高精度慣性計測ユニット(IMU)
- 磁気センサーシステム
- アルベドフリー・ファインサンセンサー
- スタートラッカー
【アクチュエーター】:
- リアクションホイールシステム (リアクションホイールシステムに関する記事はこちらまで)
- 磁気トルカ(磁気トルカに関する記事はこちらまで)
【姿勢制御方式】:
- 3軸スタビライゼーション
【Attitude pointing accuracy ranges(pointing/knowledge)
depends on the final bus parameters】:
- Up to 0.05° / up to 0.01°
【姿勢制御能力(スルーレート)】:
- 最大5°/S
【オペレーションモード】:
- 太陽指向モード(Sun pointing mode)
- 直下指向グモード (Nadir pointing mode)
- 速度ポインティングモード(Velocity pointing mode)
- 地上測地系ポインティングモード(Ground geodetic coordinate pointing mode)
- カスタムポインティングモード(Client defined pointing mode)
ペイロードコントローラーの特徴
| ▼コミュニケーション関連 | 4 x RS422トランシーバー (最大1Mbps + 3x 最大10Mbps) |
| 2 x I2Cライン(lines) | |
| 2 x CAN (1Mbps) | |
| 2 x SPIインターフェイス | |
| 2 x 1 Gbpsイーサネット | |
| USB 2.0コントローラー (エクスパンダインターフェース経由でアクセス可能) |
|
| 高帯域幅アプリケーション用の柔軟なPCIe、SATA、 USB 3.0 スペースワイヤーインターフェース (拡張インターフェイス経由でアクセス可能 ) |
|
| GPIOS、LVDSペア、拡張インターフェイスにより 電源の利用可能 |
|
| 低速IO用の40以上のI/Oポート(GPIO) | |
| 柔軟な高帯域幅IOアプリケーション用の22個のLVDSペア |
| ▼FPGA/CPU | Linuxを走らせることができるデュアルARM A9 CP |
| 複雑なデータ処理のためのArtix FPGA |
| ▼ストレージ関連 | 1 GB DDR3L or 512 MB DDR3L ECCに保護された揮発性メモリ |
| 3 x 4MビットFRAMの高信頼性ストレージ | |
| 2 x 16 MB NANDストレージ | |
| 4 x microSD 32GB~128GBインターフェイス 2 x (1+1) |
| ▼電源関連 | 電源入力:4.5 V-15.5 V |
| 外部電源制御用ロードスイッチ(2個) |
| ▼その他 | オンボードRTC |
| オンボード温度センサー | |
| PC104フォームファクター | |
| シールドオプションの利用可能 | |
| トラックレス基板設計 |
電力システム
MP42 衛星バスの電力システムの特徴・仕様
- 入力MPPTコンバーターの効率:最大97%
- 出力コンバーターの効率:最大97%
- バッテリーセルのバランシング
- フェイルセーフ設計
▼出力チャンネル:
| 出力チャンネル数: | デフォルトで20チャンネル 拡張出力の使用で最大80チャンネル (電圧レールの設定可) |
| 標準出力チャネル電流: | 3A(設定可能) |
| 最大3.3 V 出力コンバーターの電力: | 40 W |
| 最大5V 出力コンバーターの電力: | 50W |
| 最大3-18 V 出力コンバーター電力: | 50W |
| デフォルトのバッテリーバック (4S1P構成)使用時の最大無調整出力電力: |
50W |
| 拡張バッテリーパック(8S7P構成 使用時の最大無調整出力電力: |
600W |
▼入力チャンネル:
- 理想的なブロック・ダイオードを内蔵をした8個のMPPTコンバーター(16個のソーラーパネル入力チャンネル)
| 1MPPTコンバーターあたりの最大入力電力: | 50W |
| 最大充電電力: (4S1Pバッテリーパック構成時) |
20W |
| 最大充電電力: (8S7Pバッテリーパック構成 及び拡張入力コンバーター使用時) |
270W |
関連メディア
・【小型衛星市場への挑戦】 NanoAvionics - MP42
・【超小型衛星電力システム】NanoAvionics - EPS
・【小型衛星推進システム】NanoAvionics - EPSS
・【超小型衛星磁気トルカ】NanoAvionics - SatBus MTQ
お問い合わせ
製品や記事などのお問い合わせはこちらまで ⇩
スペース&コミュニケーションマーケティンググループ
担当:齊藤、佐々木
TEL:03-6757-6181
TEL:03-6757-6181




![【出展情報】SPEXA-[国際]宇宙ビジネス展@東京ビックサイト 2026/5/27(水)~5/29(金)](https://www.jepico.co.jp/dcms_media/image/SPEXA2026カバー.png)