【測量の最先端⁉】Colorized Point Cloud とは
<目次>
1. Colored/Colorized Point Cloudとは
2. LiDARとカメラ
3. XYZ+RGB=XYZRGB︖
4. GEO-INFO社製GLQ
よくつかわれています。弊社にお問い合わせいただくお客様にも、そのようなデータの解析や利⽤を専⾨とされる⽅も
増えてまいりました。[こちらの記事](Link to 「【超簡単】i-Construction対応 "Colorized Point Cloud"が
できるまで。」)では、このPoint Cloudデータから⼀歩進んだ、"Colored/Colorized Point Data"という
新しいデータ形式について触れています。この"Colored/Colorized Point Cloud"とはいったいどのような
データなのでしょうか︖このデータがあるとどのようなメリットがあるのでしょうか︖今回は、これらの
疑問について少し詳しく考えてみたいと思います。
データであり、各「点」はその座標を特定の中⼼座標からのXYZ⽅向の距離として表現しています。
このXYZ情報は絶対的な3Dマップデータであるため、⼀度取得すれば、回転させて⾓度を変えてみたり、
ズームイン・ズームアウトして観察することもできれば、物体の体積を計算したりすることも可能となります。
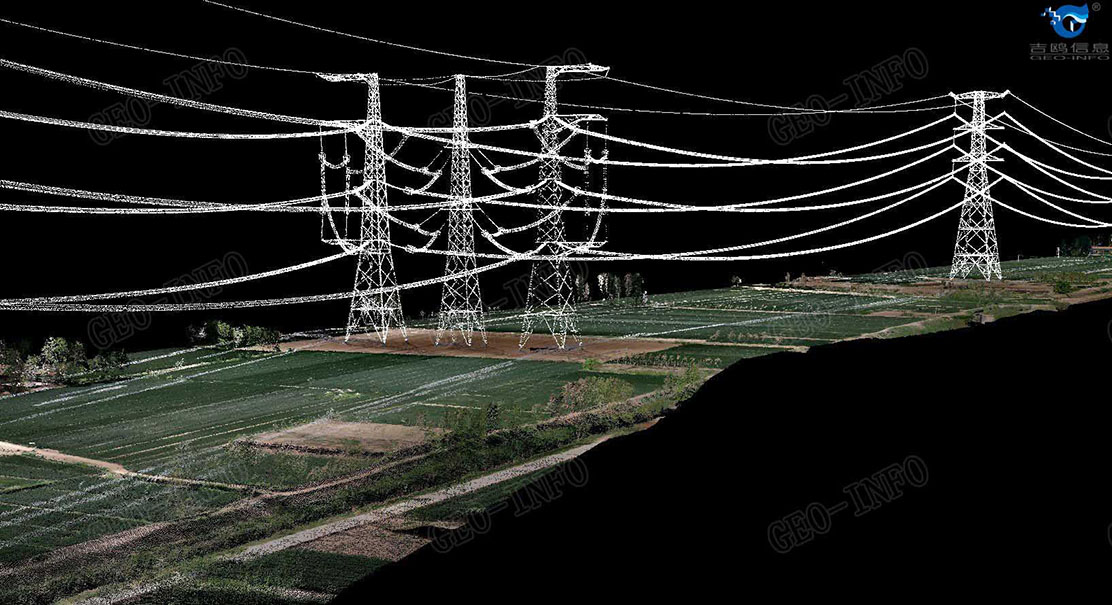
[単⼀⾊の点群データの画像を貼り付け]⼀⽅で、カメラで取得できる画像データは、そのデータ⾃⾝には
物体までの距離の情報はなく、⾼さや幅の情報についてもカメラの位置から⾒えている、カメラ⾃⾝の位置に対して
相対的な2Dの情報です。そのため、測量や3Dモデリングに使⽤するデータとするためには様々な⾓度から
画像データをカメラの位置情報と共に収集し、専⽤のアルゴリズムを⽤いてそれらを合成する必要があるでしょう。
3D LiDARなどのセンサーのように直接的に計測されるデータではなく、複数の2Dデータをかけ合わせること
によって「予測」された3Dデータとなるため精度が幾分か落ちてしまいます。ただ、カメラによって取得できる
情報のうち、3D LiDARでは取得できないものがあります。それは「⾊」情報です。3D LiDARはビームを物体に
向かって射出し、それが反射されて戻ってくるまでの時間を計測して正確な距離情報を取得します。
計測に使⽤しているビームとは光であるため、⽩い物体に反射すれば強く、⿊い物体に反射すれば弱いビーム
となって返り、反射強度という情報となって⾊情報に近いデータは取得が可能です。しかしながらそれは
緑⾊と茶⾊を識別したりすることはできないので、3D LiDAR単体のデータでは⼭肌に⽊々が茂っているのか、
⼟⽯が露出しているのかの判別はできません。その点カメラで取得するデータは、⾊情報はRGBデータとして
表現されたデータとなって取得ができています。
(XYZRGB)の情報の集合、これが「Colored Point Cloud」の正体です。座標情報に検知対象物の実際の⾊情報を
合体させて着⾊(Colorized)された点群データを⽣成すれば、物体の正確な形状と⾊による性質の両⽅を把握する
ことができるようになります。ここで注意したいのが、Colorized Point Cloudデータを⽣成するには、
3D LiDARとカメラの両⽅が必要である、という点です。双⽅のデータを合体すれば⽣成できるのですが、
⼀⾔で「合体」と⾔っても、取得している点群データと画像データはまったく別々のデバイスから取得する
ものですので、データの関連付けは容易ではありません。例えば、⾞載の3Dマップの取得システムには、
下記の写真のようなものがあります。
このシステムでは、カメラとレーザースキャナーがそれぞれ⼀定の位置・⽅向に固定された状態でデータを取得しながら、同時にGPSとオドメーターで位置情報を把握、さらにIMUによって姿勢や振動の情報を取得しています。
収集されたデータは後程それぞれの機器からのTimestampで同期されます。同期されたそれぞれの相対的な
位置情報や姿勢情報などでデータは各点の座標情報と⾊情報の整合性をとるための補正に使⽤されます。
このようなデータの合成プロセスを経て⽣成されたPointデータを集めて、やっとカラーの3Dデータを
作成することができるようになります。
冒頭のリンクの記事で紹介させていただいている通り、GLQをドローンに搭載してデータを収集し簡単な操作で
Colorized Point Cloudを取得することができます。建設業務において地形データの詳細な把握を⾏う上で、
ドローンを使⽤したデータの収集は今後よりその重要性が増していくことが予想されます。形状と性質の
両⽅のデータを平易な操作で取得を可能にする本製品は、そのようなニーズに最適なソリューションと
⾔えるのではないでしょうか︖
GLQ_Plusの詳細はこちら: https://www.jepico.co.jp/products/search/product08/item_49
M8 LiDARの詳細はこちら: https://www.jepico.co.jp/products/search/product04/item_100
Colorized Point Cloudができるまで:https://www.jepico.co.jp/media/maker/a78
製品に関する問合せはこちら:https://www.jepico.co.jp/contact.html
1. Colored/Colorized Point Cloudとは
2. LiDARとカメラ
3. XYZ+RGB=XYZRGB︖
4. GEO-INFO社製GLQ
1. Colored/Colorized Point Cloud
⾃律⾛⾏のようなロボティクスの分野では「Point Cloudデータ」、⽇本語なら「点群データ」というデータがよくつかわれています。弊社にお問い合わせいただくお客様にも、そのようなデータの解析や利⽤を専⾨とされる⽅も
増えてまいりました。[こちらの記事](Link to 「【超簡単】i-Construction対応 "Colorized Point Cloud"が
できるまで。」)では、このPoint Cloudデータから⼀歩進んだ、"Colored/Colorized Point Data"という
新しいデータ形式について触れています。この"Colored/Colorized Point Cloud"とはいったいどのような
データなのでしょうか︖このデータがあるとどのようなメリットがあるのでしょうか︖今回は、これらの
疑問について少し詳しく考えてみたいと思います。
2. LiDARとカメラ
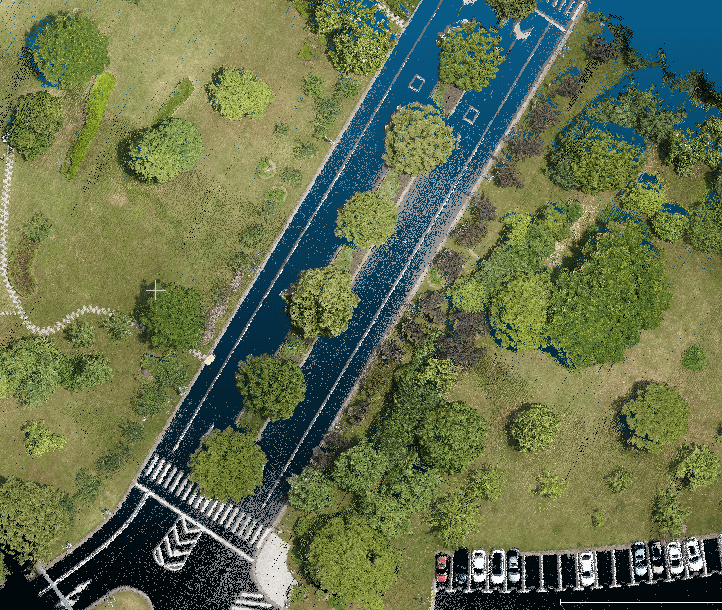
3D LiDAR などのセンサーが出⼒する Point Cloud データは、その名の通り無数の点によって⽴体を表現したデータであり、各「点」はその座標を特定の中⼼座標からのXYZ⽅向の距離として表現しています。
このXYZ情報は絶対的な3Dマップデータであるため、⼀度取得すれば、回転させて⾓度を変えてみたり、
ズームイン・ズームアウトして観察することもできれば、物体の体積を計算したりすることも可能となります。
[単⼀⾊の点群データの画像を貼り付け]⼀⽅で、カメラで取得できる画像データは、そのデータ⾃⾝には
物体までの距離の情報はなく、⾼さや幅の情報についてもカメラの位置から⾒えている、カメラ⾃⾝の位置に対して
相対的な2Dの情報です。そのため、測量や3Dモデリングに使⽤するデータとするためには様々な⾓度から
画像データをカメラの位置情報と共に収集し、専⽤のアルゴリズムを⽤いてそれらを合成する必要があるでしょう。
3D LiDARなどのセンサーのように直接的に計測されるデータではなく、複数の2Dデータをかけ合わせること
によって「予測」された3Dデータとなるため精度が幾分か落ちてしまいます。ただ、カメラによって取得できる
情報のうち、3D LiDARでは取得できないものがあります。それは「⾊」情報です。3D LiDARはビームを物体に
向かって射出し、それが反射されて戻ってくるまでの時間を計測して正確な距離情報を取得します。
計測に使⽤しているビームとは光であるため、⽩い物体に反射すれば強く、⿊い物体に反射すれば弱いビーム
となって返り、反射強度という情報となって⾊情報に近いデータは取得が可能です。しかしながらそれは
緑⾊と茶⾊を識別したりすることはできないので、3D LiDAR単体のデータでは⼭肌に⽊々が茂っているのか、
⼟⽯が露出しているのかの判別はできません。その点カメラで取得するデータは、⾊情報はRGBデータとして
表現されたデータとなって取得ができています。
3. XYZ+RGB=XYZRGB︖
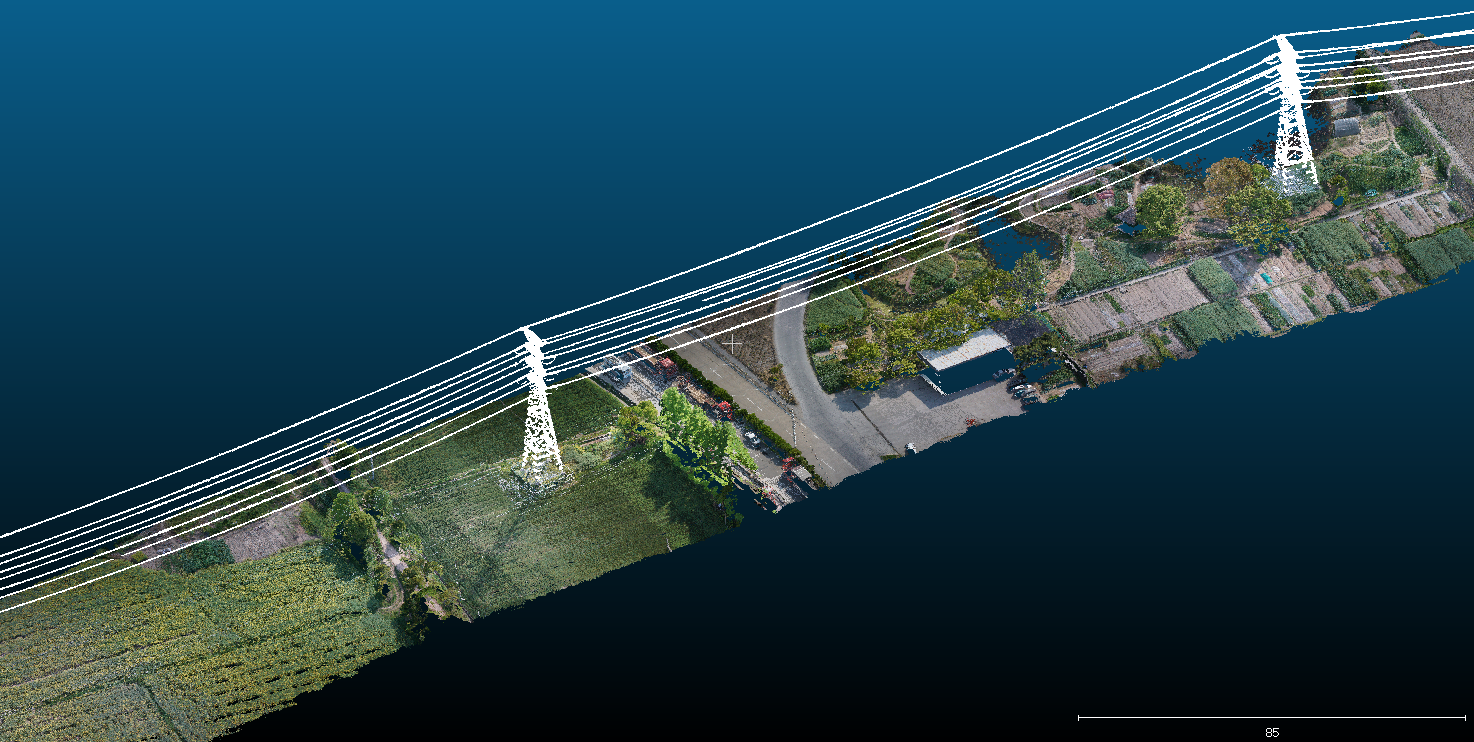
3D LiDARによって取得が可能な(XYZ)の座標情報と、カメラで取得が可能な(RGB)の⾊情報の両⽅を含む(XYZRGB)の情報の集合、これが「Colored Point Cloud」の正体です。座標情報に検知対象物の実際の⾊情報を
合体させて着⾊(Colorized)された点群データを⽣成すれば、物体の正確な形状と⾊による性質の両⽅を把握する
ことができるようになります。ここで注意したいのが、Colorized Point Cloudデータを⽣成するには、
3D LiDARとカメラの両⽅が必要である、という点です。双⽅のデータを合体すれば⽣成できるのですが、
⼀⾔で「合体」と⾔っても、取得している点群データと画像データはまったく別々のデバイスから取得する
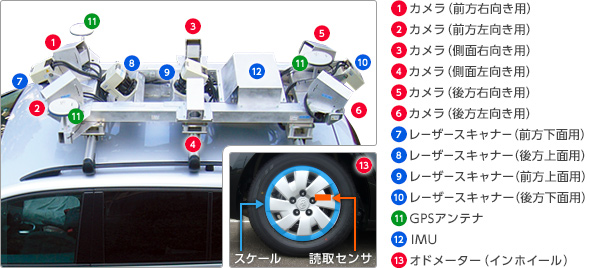
ものですので、データの関連付けは容易ではありません。例えば、⾞載の3Dマップの取得システムには、
下記の写真のようなものがあります。
このシステムでは、カメラとレーザースキャナーがそれぞれ⼀定の位置・⽅向に固定された状態でデータを取得しながら、同時にGPSとオドメーターで位置情報を把握、さらにIMUによって姿勢や振動の情報を取得しています。
収集されたデータは後程それぞれの機器からのTimestampで同期されます。同期されたそれぞれの相対的な
位置情報や姿勢情報などでデータは各点の座標情報と⾊情報の整合性をとるための補正に使⽤されます。
このようなデータの合成プロセスを経て⽣成されたPointデータを集めて、やっとカラーの3Dデータを
作成することができるようになります。
4. GEO-INFO社製GLQ
弊社でお取扱いさせていただいているGEO-INFO社のGLQは、これらの処理をドローンで実現可能にする製品です。冒頭のリンクの記事で紹介させていただいている通り、GLQをドローンに搭載してデータを収集し簡単な操作で
Colorized Point Cloudを取得することができます。建設業務において地形データの詳細な把握を⾏う上で、
ドローンを使⽤したデータの収集は今後よりその重要性が増していくことが予想されます。形状と性質の
両⽅のデータを平易な操作で取得を可能にする本製品は、そのようなニーズに最適なソリューションと
⾔えるのではないでしょうか︖
GLQ_Plusの詳細はこちら: https://www.jepico.co.jp/products/search/product08/item_49
M8 LiDARの詳細はこちら: https://www.jepico.co.jp/products/search/product04/item_100
Colorized Point Cloudができるまで:https://www.jepico.co.jp/media/maker/a78
製品に関する問合せはこちら:https://www.jepico.co.jp/contact.html



![【出展情報】SPEXA-[国際]宇宙ビジネス展@東京ビックサイト 2026/5/27(水)~5/29(金)](https://www.jepico.co.jp/dcms_media/image/SPEXA2026カバー.png)
